👀 목차
- 닌텐도에 커맨드 패턴을 적용하자.
- 파일 생성, 제거에 매크로 커맨드 패턴을 적용하자.
1. 닌텐도에 적용해 보자.
닌텐도 스위치에 커맨드 패턴을 적용해보자. 닌텐도 스위치 개발자라고 생각하자.
1-1. 고려 사항
1. 게임 별로 닌텐도 버튼 별 동작을 적용시켜야 한다.
2. 사용자의 버튼을 기록하여 갑자기 닌텐도가 꺼져도 원복이 가능해야한다.
3. 여기서는 간단하게 하기 위해 8가지 버튼만 존재한다고 가정 (왼쪽 4개 + 오른쪽 4개 버튼)
> 테스트는 간단히 4개만 셋팅하겠습니다.

https://brunch.co.kr/@wikitree/2809 참고 이미지
1-2. 커맨드 기능 정리
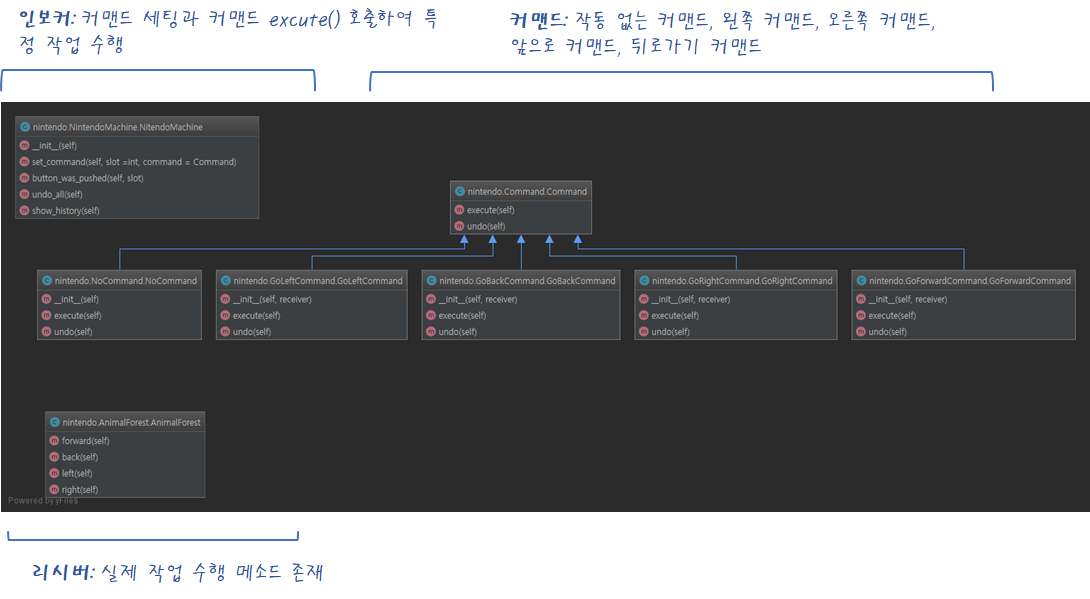
- 리시버: 젤다-더 와일드, 젤다-꿈꾸는 섬, 동물의 숲, 마리오 카트 등이 존재
- 클라이언트: 젤다1 개발자, 젤다2 개발자, 동물의 숲 개발자 / 사용자
- 커맨드: 동물의 숲 의 경우, 1) 위로 가기 2) 오른쪽으로 가기 3) 왼쪽으로 가기 4) 뒤로 가기 5) 말걸기 6) 뛰기 등 존재
- 인보커: 닌텐도 스위치
1-3. UML
1-4. 소스 코드
1) 커맨드- 오른쪽으로 가기, 왼쪽으로 가기, 앞으로 가기, 뒤로 가기 커맨드 정의
import abc
class Command(object):
"""
커맨드 인터페이스
"""
__metaclass__ = abc.ABCMeta
@abc.abstractclassmethod
def execute(self):
"""
커맨드를 실행하기 위한 추상 메소드
:return:
"""
pass
@abc.abstractclassmethod
def undo(self):
"""
커맨드를 실행하기 취소하기 위한 메소드
:return:
"""
pass
class NoCommand(Command):
"""
아무 작업도 안하는 커맨드
"""
def __init__(self):
pass
def execute(self):
pass
def undo(self):
pass
class GoBackCommand(Command):
"""
뒤로 가는 커맨드
"""
def __init__(self, receiver):
self.receiver = receiver
def execute(self):
"""
뒤로 가기
:return:
"""
self.receiver.back()
def undo(self):
"""
앞으로 가기
:return:
"""
self.receiver.forward()
class GoForwardCommand(Command):
"""
앞으로 나가는 커맨드
"""
def __init__(self, receiver):
self.receiver = receiver
def execute(self):
"""
리시버로 앞으로 가기 호출
:return:
"""
self.receiver.forward()
def undo(self):
"""
리시버로 앞으로 가기 취소
:return:
"""
self.receiver.back()
class GoLeftCommand(Command):
"""
앞으로 나가는 커맨드
"""
def __init__(self, receiver):
self.receiver = receiver
def execute(self):
"""
리시버로 왼쪽으로 가기 호출
:return:
"""
self.receiver.left()
def undo(self):
"""
리시버로 왼쪽으로 가기 취소
:return:
"""
self.receiver.right()
class GoRightCommand(Command):
"""
오른쪽으로 가는 커맨드
"""
def __init__(self, receiver):
self.receiver = receiver
def execute(self):
"""
리시버로 오른쪽 가기 호출
:return:
"""
self.receiver.right()
def undo(self):
"""
리시버로 오른쪽 가기 취소
:return:
"""
self.receiver.left()2) 리시버 - 실제 작업자
여기서는 동물의 숲 게임만 정의함
class AnimalForest(object):
"""
리시버: 실제 동물의 숲 행동 메소드 저장소
"""
def forward(self):
"""
앞으로 나가기
:return:
"""
print("앞으로 나간다")
def back(self):
"""
뒤로 가기
:return:
"""
print("뒤로 간다.")
def left(self):
"""
오른쪽으로 이동
:return:
"""
print("왼쪽으로 간다.")
def right(self):
"""
오른쪽으로 이동
:return:
"""
print("오른쪽으로 간다.")3) 인보커 - 닌텐도 머신
class NitendoMachine(object):
"""
인보커 - 닌텐도 머신
"""
def __init__(self):
self.array_command = [NoCommand()] *8 # 커맨드 리스트
self.history =[] # 명령 히스토리 저장
def set_command(self, slot =int, command = Command):
"""
버튼 별 커맨드 적용
:param slot:
:param command:
:return:
"""
self.array_command[slot] = command
def button_was_pushed(self, slot):
self.array_command[slot].execute()
self.history.append(self.array_command[slot])
def undo_all(self):
print('Undo all')
for command in reversed(self.history):
command.undo()
print('Undo all finished.')
def show_history(self):
print("*******history******")
for history in self.history:
print("history:", history)4) 클라이언트
if __name__ == '__main__':
"""
클라이언트
"""
# 1. 리시버 정의
animal_game = AnimalForest()
# 2. 커맨드 정의
go_forward_command = GoForwardCommand(receiver=animal_game)
go_back_command = GoBackCommand(receiver=animal_game)
go_left_command = GoLeftCommand(receiver=animal_game)
go_right_command = GoRightCommand(receiver=animal_game)
# 3. 인보커 정의 = 리모컨 정의 및 커맨드와 연결
remote_nintendo = NitendoMachine()
remote_nintendo.set_command(0, go_forward_command)
remote_nintendo.set_command(1, go_back_command)
remote_nintendo.set_command(2, go_left_command)
remote_nintendo.set_command(3, go_right_command)
# 4. 실제 게임 진행
remote_nintendo.button_was_pushed(1)
remote_nintendo.button_was_pushed(0)
remote_nintendo.button_was_pushed(2)
remote_nintendo.button_was_pushed(3)
# 5. history 출력
remote_nintendo.show_history()
# 6. undo all
remote_nintendo.undo_all()2. 파일 생성 및 삭제를 커맨드에 적용하자.
파일 생성 및 제거하는 작업을 매크로 패턴에 적용해 보자. 추가적으로 UNDO 작업도 넣을 것이다.
2-1. 기능 정리
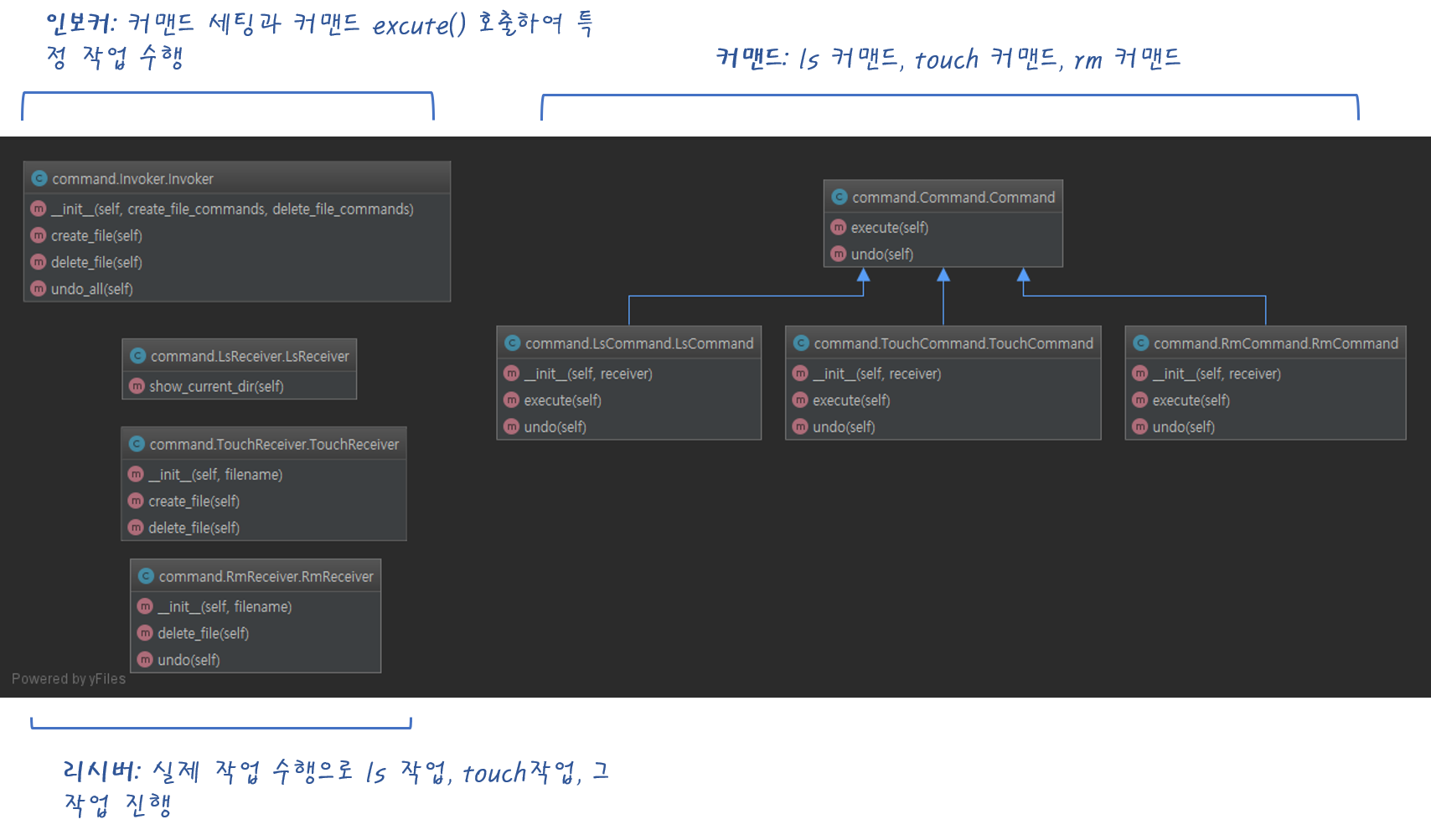
- 커맨드: ls 커맨드 , touch 커맨드, rm 커맨드 존재 > exexute(), undo() 정의
- 리시버: ls, touch, rm 실제 작업자
- 인보커: 커맨드 세팅과 커맨드의 execute() 호출하여 실제 작업, undo() 호출하여 작업 취소 기능
- 클라이언트: 파일 생성, 제거 작업을 진행
2-2. UML
2-3.소스 코드
1) 커맨드 클래스 정의
import abc
class Command(object):
"""
커맨드 인터페이스
"""
__metaclass__ = abc.ABCMeta
@abc.abstractclassmethod
def execute(self):
"""
커맨드 실행 메소드
:return:
"""
pass
@abc.abstractclassmethod
def undo(self):
"""
커맨드 실행 취소 메소드
:return:
"""
pass
class LsCommand(Command):
"""
유닉스 명령어 ls 흉내내는 실제 커맨드
"""
def __init__(self, receiver):
self.receiver = receiver
def execute(self):
"""
리시버의 행동 호출
:return:
"""
self.receiver.show_current_dir()
def undo(self):
"""
ls 커맨드는 취소 못함
:return:
"""
pass
class RmCommand(Command):
"""유닉스 명령어 rm 실제 커맨드"""
def __init__(self, receiver):
self.receiver = receiver
def execute(self):
self.receiver.delete_file()
def undo(self):
self.receiver.undo()
class TouchCommand(Command):
""" 유닉스 명령어 touch 실제 커맨드"""
def __init__(self, receiver):
self.receiver = receiver
def execute(self):
self.receiver.create_file()
def undo(self):
self.receiver.delete_file()2) 리시버 - 실제 작업자
import os
class LsReceiver(object):
def show_current_dir(self):
"""
실제 ls 동작 메소드
:return:
"""
cur_dir = './'
filenames = []
for filename in os.listdir(cur_dir):
if os.path.isfile(os.path.join(cur_dir, filename)):
filenames.append(filename)
print('Content of dir: ', ' '.join(filenames))
class RmReceiver(object):
def __init__(self, filename):
self.filename = filename
self.backup_name = None
def delete_file(self):
"""파일 삭제를 실제하는 메소드"""
self.backup_name = '.' + self.filename
os.rename(self.filename, self.backup_name)
def undo(self):
"""파일 삭제 복구 매소드"""
original_name = self.backup_name[1:]
os.rename(self.backup_name, original_name)
self.backup_name = None
class TouchReceiver(object):
def __init__(self, filename):
self.filename = filename
def create_file(self):
"""실제 파일을 생성하는 메소드"""
with open(self.filename, 'a'):
os.utime(self.filename, None)
def delete_file(self):
"""파일 생성을 취소하는 메소드"""
os.remove(self.filename)3) Invoker
class Invoker(object):
def __init__(self, create_file_commands, delete_file_commands):
self.create_file_commands = create_file_commands
self.delete_file_commands = delete_file_commands
self.history = []
def create_file(self):
print('파일 생성중')
for command in self.create_file_commands:
command.execute()
self.history.append(command)
print('File 생성됨\n')
def delete_file(self):
print ('파일 제거중')
for command in self.delete_file_commands:
command.execute()
self.history.append(command)
print('File 제거됨.\n')
def undo_all(self):
print('Undo all')
for command in reversed(self.history):
command.undo()
print('Undo all finished.')
def show_history(self):
""" 히스토리 print """
for his in self.history:
print("history", his)4) client
if __name__ == '__main__':
# Client
# 1. LS 관련
# 1-1. 리시버 정의 : 실제 작업자
ls_receiver = LsReceiver()
# 1- 2. 커맨드 정의: 커맨드에 리시버 전달
ls_command = LsCommand(ls_receiver)
# 2. Touch 관련
# 2-1. 리시버 정의
touch_receiver = TouchReceiver('test.text')
# 2-2. 커맨드 정의
touch_command = TouchCommand(touch_receiver)
# 3. RM 관련
# 3-1. 리시버 정의
rm_receiver = RmReceiver('test.text')
# 3-2. 커맨드 정의
rm_command = RmCommand(rm_receiver)
# 매크로 커맨드 정의: 여러 작업을 한번에 진행
create_file_commands = [ls_command, touch_command, ls_command]
delete_file_commands = [ls_command, rm_command, ls_command]
# 인보커 정의: 인보커에게 커맨드 전달
invoker = Invoker(create_file_commands, delete_file_commands)
# 인보커가 리시버에게 작업해달라고 요청
invoker.create_file()
invoker.delete_file()
invoker.show_history()
invoker.undo_all()소스 코드
참고
- python design patterns 책